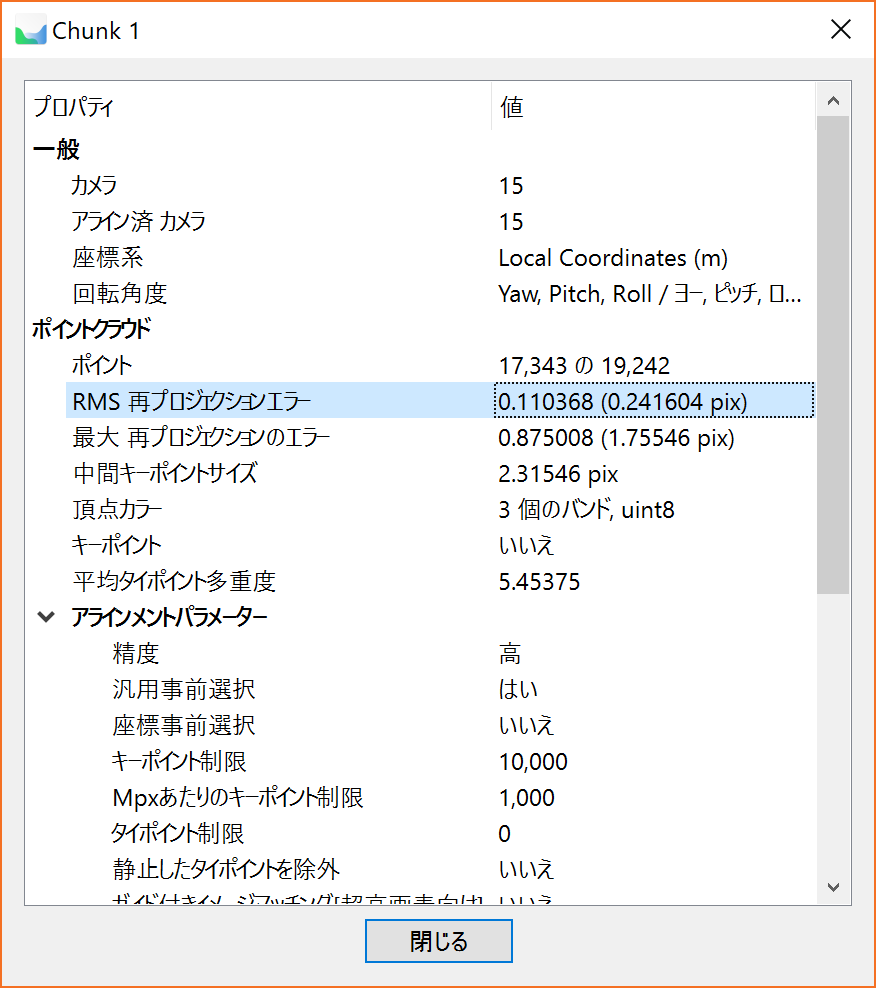
【専門的な説明】全タイポイント(複数画像間で対応付けられた特徴点)の、全プロジェクション(対応付けられた全画像への投影;全画像上の位置)に関する再投影誤差(特徴点の、推定したカメラパラメータに基づいて推定した画像上の位置と、特徴点として検出された位置)のRMS (Root Mean Square)が、基準値を超えている場合に発出されます。画像だけで行うSfMは、画像間で対応する特徴点(タイポイント)を見つけた後、再投影誤差RMSを最小化するようにカメラパラメータ(撮影の位置・向きを表す外部パラメータと、カメラの焦点距離やレンズ歪みなどを表す内部パラメータ)を推定します。したがって再投影誤差RMSが大きいことは、SfMが見つけた画像間の特徴点の対応(マッチング)が、推定したカメラパラメータではうまく表現できていないことを示します。
【説明】「座標設定」ダイアログの設定項目である「マーカー精度 (m)」は、マーカーの世界座標の観測(現場での測量など)に期待する誤差の標準偏差あるいはRMSです。「マーカー精度 (m)」はX, Y, Zの方向別に定義されていますが、それを3軸合成したもの(それらを成分とする3次元ベクトルの長さ)が、目標精度(検証点誤差RMSの目標値)を超えていることを、このアラートは意味します。検証点マーカーの座標の観測の時点で、目標精度を超える誤差が出ていると思われるわけですから、SfMに一切の誤差がなくとも、目標精度の達成が統計学的に期待薄です。
※ 本プログラムは、実行直後にユーザーに、目標精度の入力を求めます。ここで目標精度とは「検証点のSfMの結果(カメラパラメータ)に基づく推定位置と、現地地上測量などによる観測位置の距離 [m]の、RMS(Root Mean Square;代表値の1つで、平均より大きい)」です。短く書けば、検証点誤差(3軸合成)のRMSとなります。同じプロジェクトをcheckSfMにチェックさせても、目標精度次第で、アラートが出たり出なかったりします。
【著者/Author】 Ariyo Kanno
【著作権に関する注意事項/Notes on copyright】 本プログラムの一部は、Agisoft Forum (https://www.agisoft.com/forum/)において、ユーザーからの質問に対してAgisoft Technical SupportのAlexey Pasumansky氏が投稿したコードをコピーして作られています。該当箇所にはコピーしたコードのあるURLを示しています。 This source code is partially made by copying the source code posted by Alexey Pasumansky (Agisoft Technical Support) to Agisoft Forum (https://www.agisoft.com/forum/).
Richardson et al.(2016)によると、SNRとCNRはともにコード変調された信号における信号パワーとノイズパワーの比であるが、SNRは受信機内の相関器で計算されるもので、CNR(C/Noと表記されることもある)は(増幅前の)受信アンテナにおける値とのことだ(定義αとする)。信号もノイズも、アンテナと相関器の間で同じくらいの倍率で増幅されるので、CNRとSNRの値はほぼ同じと考えて良いとのこと。
Richardson et al.(2016)に引用されているLangley (1997)によると、C/Noは Carrier-to-Noise density Ratioの略で、ベースバンドの1 Hz帯域幅における搬送波のパワーとノイズパワーの比とされている。そして文脈を見ると、どうやら復調後に評価するようだ。CNRの名前からするとこちらの定義の方が納得がいく(定義βとする)。
一方で搬送波については、反射波が重なることで位相が変わるので、そもそも伝搬距離の違いが大きくても搬送波位相測定への影響が小さいとは言えないように思う(空気中での減衰を無視すれば)。水面の各部からの反射波のうち、無害な反射波とは、上図の2 h cosθが大きい反射波ではなく、それが波長で割り切れる反射波か、水面での反射率が小さかった反射波だろう。
タイポイントの分散は、アラインメント後のオンデマンドのバンドル調整を行うダイアログ"Optimize Camera Alignment"(カメラアラインメントを最適化)で、"Estimate tie point covaiance"(タイポイントの分散を推定する)にチェックを入れることで、計算できる。
これは何かというと、上記のような無限回の「試行」をしたとき、タイポイントが最も動きやすい方向とその動きやすさを示したものである。タイポイントの座標にはX, Y, Zの3成分あるので、X, Y, Zそれぞれに分散があるし、X-Y, X-Z, Y-Zそれぞれの間に共分散がある。それらの兼ね合いで、最も動きやすい(バラつきの大きい;不安定な)方向と動きやすさ(バラつきの大きさ;不安定さ)が決まる。このベクトルプロットは、それらの視覚的に示したものである。詳しく学ぶには、まずは2次元の「誤差楕円」について学ぶのがよいと思われる。